
友情提示:同学您好,此页面仅供预览,在此页面学习不会被统计哦! 请进入学习空间后选择课程学习。
|
| 典型的机械 用牛顿力学(质点)描写的困难?
|

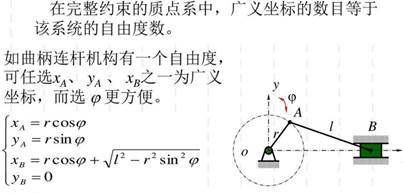
广义坐标摆脱了直角坐标系下对复杂系统所造成的困难,并用最少的参数描述系统位形
|
系统什么时候受力平衡? |
|
| 稳定平衡 不稳定平衡 | |
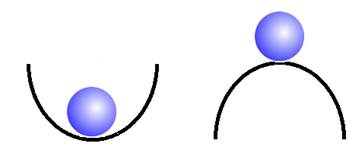
●虚功原理:平衡处为势能的极值,对微小位移做功为零
|
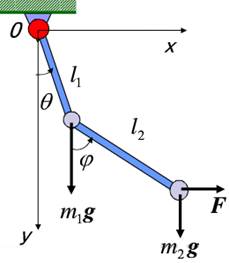
| 广义坐标:θ φ
虚功
|
![]()
![]()
![]()
如何使它总是等于零?只能
 à 解出θ φ
à 解出θ φ